CALL US: (805) 656-1760
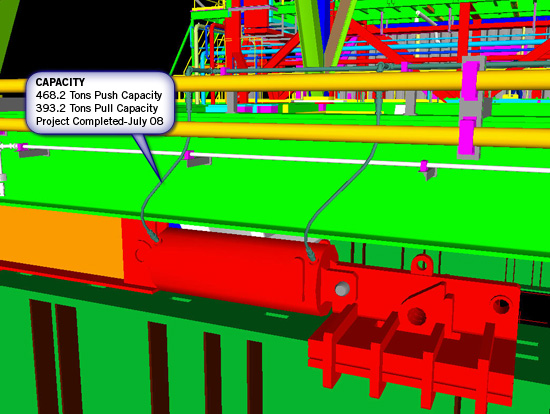
This style of gripping system can be designed to move up to 1000 tons. This system requires a slotted beam.

In order to push or pull the rig, the jacking claws will rotate either clockwise or counter clockwise for pushing or pulling modes. (as highlighted in attached pictures and identified as the “jacking claws”). In the clockwise or down position: the engagement of the gripper box assembly to the skid beam occurs. In this mode, pushing of the rig is possible. In the “up” position: the jacking cylinder is retracted and the gripper box assembly will move to the next slot position.